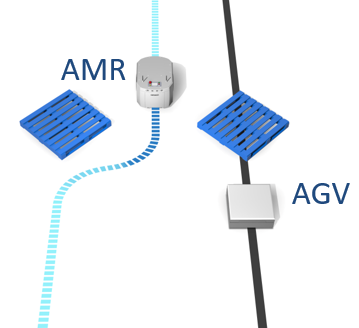
Autonomous robots are generally classified into two main categories based on their navigation methods: AMR (Autonomous Mobile Robots) and AGV (Automated Guided Vehicles).
In AGV robots, navigation is carried out using installed rails, magnetic tapes, floor markings, and other predefined guides. In contrast, AMR robots navigate autonomously using sensors and cameras, without the need for environmental modifications. AMRs utilize pre-programmed instructions, image processing algorithms, and other technologies to detect and avoid obstacles or individuals, continuously adjusting their route. By processing a comprehensive map of their workspace, they can identify the optimal path in real-time.
Navigation
AGVs typically rely on predefined paths or ground markers for navigation. They detect obstacles using contact sensors, ultrasonic sensors, laser sensors, and other detection technologies. However, AGVs cannot change their route around obstacles and will stop until the obstruction is removed.
AMRs, on the other hand, use similar sensors for obstacle detection but leverage Simultaneous Localization and Mapping (SLAM) technology, enabling them to reroute and maneuver around obstacles dynamically.
Flexibility
AGVs are designed for specific environments and strictly follow pre-defined paths. They require the installation of physical infrastructure for navigation, making them less adaptable to environmental changes.
Conversely, AMRs are significantly more flexible and adaptive, capable of operating in dynamic environments without requiring modifications to the surroundings. This level of adaptability makes AMRs more attractive for various business applications.
Deployment
AGVs often require skilled personnel for route planning and task assignments. Any modifications to layouts or tasks may necessitate reprogramming or infrastructure adjustments.
AMRs, however, are designed for ease of use. They can be programmed and reconfigured by non-technical staff through intuitive user interfaces.
Cost
AGVs have higher initial setup and deployment costs due to their need for dedicated infrastructure modifications. However, their production costs are generally lower than AMRs.
On the other hand, AMRs eliminate the need for environmental changes during deployment, making them more cost-effective in the long run.
Safety
AGVs are typically equipped with safety features such as sensors and emergency stop buttons. However, they may require physical barriers to separate them from human workers for safety purposes.
AMRs, in contrast, are equipped with advanced safety features such as obstacle detection, collision avoidance, and the ability to slow down or stop when encountering humans or objects. They are designed to operate safely alongside human workers without requiring physical barriers.
Applications
AGVs are commonly used in industries such as automotive manufacturing, production facilities, and environments requiring frequent material transport.
AMRs, with their broader range of applications, are used not only in these industries but also in e-commerce, healthcare, and other fields where flexibility and adaptability are critical.